


|
Multirotors
Octorotors Beetec X8 - 8 moteurs sur bras repliables - Autopilote : DJ Wookong M - Nacelle stabilisée par le Wookong M. - Prise de vue : Reflex EOS 760D (21 Mpix) avec caméra d'œilleton couleur - Retour vidéo : émetteur vidéo 5,8 Ghz - Retour altimétrique permanent sur le retour vidéo - Alimentation : 1 accus LiPo de 12 Ah (30 C) - Retour télémétrique des informations des accus - Poids à vide : 2,3 Kg. - Poids en ordre de marche : 4,5 kg. - Autonomie de vol : 9 mn, soit 5 mn de prise de vue "active"
Phantom 3 pro - 4 moteurs, capteur caméra de 12 Mpix - Aucune intervention possible sur le drone. - Radio fournie avec le drone. Pilotage sur tablette avec logiciel DJGo. - Retours télémétriques très nombreux. - Parfait pour la vidéo mais nettement moins performant pour la photographie. - Autonomie de vol : environ 25 mn.
Phantom 4 pro - 4 moteurs, capteur caméra de 20 Mpix - Radio fournie avec le drone. Pilotage sur tablette avec logiciel DJGo 4. - Nombreux capteurs pour la sécurité de vol. Retours télémétriques plus complets que ceux du Phantom 3. - Parfait pour la vidéo et désormais aussi pour la photographie. - Le rendu photographique reste cependant en retrait par rapport à celui d'un reflex numérique. - Autonomie de vol identique.
S 900 - 6 moteurs - Caractéristiques techniques, de retour vidéo et de vol proches du Beetec. - Pieds repliables en vol. - Ce modèle avait été doté d'une nacelle très particulière (système de rotation sur l'axe horizontal) mais fragile sur laquelle je montais mon EOS 760D. - Autonomie de vol : 12 minutes - Mode de pilotage : toujours sur pupitre. |
|
Généralités |
|
Historique CV |
|
Accueil |




|
ISDT FD 100 |
|
Décharge d'un accu avec l'ISDT 100 |
|
Pilotage et retour vidéo sol
Le pupitre de commande pour le Beetec et le S900 (1) comprend :
- la radiocommande (Hitec) (le dernier modèle inclut le retour télémétrique accu) - les retours télémétriques batterie - l'écran du retour vidéo de la visée du reflex. Il est ici présenté en statique sans son (indispensable) cache de visée. Le déclenchement de la prise de vue est réalisé par un interrupteur à bascule. L'interrupteur de choix de type de vol (GPS, Atti, Manuel) a été recoupé au raz de sa sortie afin d'éviter toute manipulation accidentelle. L'inclinaison du reflex se fait à l'aide d'un potentiomètre (modification de la radio car ceux d'origine sont crantés) avec repère de positionnement pour la visée verticale. La réception vidéo (2) est portée sur l'épaule. C'est la même qu'en cerf-volant ou ballon. Il suffit de changer le récepteur vidéo. Comme pour le travail en cerf-volant ou en ballon, une seconde réception complète avec écran est éventuellement destinée à l'archéologue. Le mode de pilotage : Par soucis de sécurité toutes mes radions ont la même configuration des manches qu'en pilotage planeur RC (Mode 2).
Pupitre de commande pour Phantom 3 et 4
- C'est le même pupitre qui est utilisé. - Un pare-soleil spécial en Spi a été conçu pour avoir une vision lumineuse (même en plein soleil) et sans reflets sur la tablette. Il se fixe par des velcros sous la tablette et un petit volet sur le devant permet d'avoir accès à l'écran tactile. La fermeture de ce volet se fait par un petit aimant. L'écran de la tablette (8 pouces) a reçu un film de protection mat pour limiter les reflets. - Les radiocommandes ont été dotées d'un écrou ce qui permet de les fixer fermement sur le pupitre. - Des petits ronds de caoutchouc ont été placés sur les contacteurs de prise de vue et de déclenchement vidéo afin de les trouver plus aisément sans quitter l'écran des yeux. - La plaquette électronique de sortie USB vers la tablette a été changée afin d'avoir une sortie HDMI pour un second écran. |
|
Pare-soleil pour la tablette des Phantoms 3 et 4 |



|
Gestion des accus LiPo
Comme en modélisme avion ou planeur, les accus LiPo sont le point faible dans l'utilisation d'un multirotors. On doit toujours utiliser des chargeurs spéciaux et surtout ne pas stocker des accus chargés même pour un temps très court. Les accus DJI sont dits intelligents mais leur décharge rapide (en cas d'annulation de vol ou de fin de travail sans avoir utilisé tous les accus) n'est possible qu'en faisant tourner les moteurs "sur table".
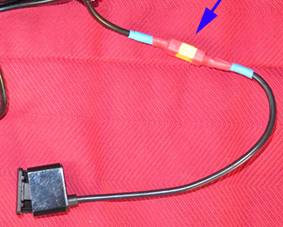
Un système très simple existe : l'ISDT FD 100. Une prise XT 60 permet de brancher les accus à décharger. On peut choisir le nombre de cellules et l'intensité de décharge. Le système s'arrête quand les cellules ont atteint 3,8 v par élément. Il faut simplement couper le fil de branchement à l'accu à 20 cm de la prise et mettre en place deux prises XT 60 (mâle et femelle). Il n'est pas possible de se tromper : il n'y a que deux fils dans le câble. C'est avec un ISDT 100 que je décharge désormais tous mes accus de drone DJI (Ph 3 et 4) ou les gros accus Tattu 4S de 12 Ah. |
|
Câble de charge des Phantom 3 ou 4 modifié |
|
Sécurité d'abord
Comme pour le travail en cerf-volant ou en ballon, la règle de base (renforcée par les obligations de la législation) est la protection des personnes et des biens. Sur une fouille il est assez facile d'évacuer la zone de survol et d'interdire l'accès par des balisages ou barrières. En scénario S1, on prend donc peu de risques à survoler les squelettes d'une nécropole et les dégagements de murs de villas gallo-romaines ! Il ne faut pas oublier que malgré toutes les précaution prises nous restons à la merci d'un problème mécanique ou électronique. Piloter un multirotors c'est renouer avec le stress du pilotage planeur RC ! Seul sur la fouille, je porte toujours un casque de chantier. Si l'archéologue en charge du site souhaite vérifier les zones photographiées, il doit lui aussi porter un casque et reste juste à côté de moi avec son écran. Il est impératif de vérifier son matériel avant et après le vol et de faire une révision régulière au delà de la simple inspection. Les recalibrages des centrales inertielles, des compas, de la nacelle, des capteurs de détection d'obstacles doivent être réalisés très régulièrement.
Attention au sable et à la poussière !
Sauf à utiliser un terrain herbeux, le décollage et l'atterrissage d'un petit ou d'un gros multirotors soulèvent toujours une impressionnante poussière. Or celle-ci peut recouvrir l'objectif (et nuire à la qualité de l'image), s'introduire dans la monture de l'APN (et bloquer le zoom et la mise au point), dans les moteurs et les prises de l'électronique embarquée. Les moteurs brushless de qualité sont en effet à cage tournante ouverte pour un bon refroidissement. L'entrefer étant très faible, rien ne doit y rentre sous peine de blocage.. et de crash. Sur les chantiers avec mon Beetec je met donc en place une bâche de 5 m sur 2 m fixée par des piquets de tente ce qui autorise des décollage et atterrissages dans de bonnes conditions. Avec les Phantom je décolle depuis la caisse de transport. En cas de pénétration de poussière ou de sable il faut aspirer les moteurs avant de doucement tenter de les faire tourner en douceur.
Tout le matériel fragile (radiocommande, appareils photos, objectifs, lecteurs de cartes, ordinateur portable, anémomètre etc.), doit impérativement être protégé dans des sacs plastiques Minigrip étanches adaptés. On ne doit en sortir le matériel qu’au moment de l’utilisation et l’y ranger dès la fin de la manip. |